
20. juni 2024: NTNUs forskningsskip Gunnerus siger ut fra Nidelven til tokt i Trondheimsfjorden forbi Albuskjell hvor «Norges tøffeste» blir spilt inn og ut mot Ila – på andre siden av Trondheim sentrum.
Nede på dypet rett utenfor Ila ligger det et fly fra andre verdenskrig, men i dag er det ikke krigshistorie som står på agendaen, derimot testing av undervannsroboter.
Flygende tredje øye

Før lunsj skal slangeroboten Eelume testes sammen med en liten ROV (remotely operated vehicle) av stipendiatene Markus Iversflaten og Bjørn Kåre Sæbø.
Den lille ROV-en, kalt BlueROV, skal trenes til å følge Eelume ute på oppdrag, slik at den kan filme hvordan det går med Eelume eller for eksempel se om kysten er klar rundt neste «hjørne».
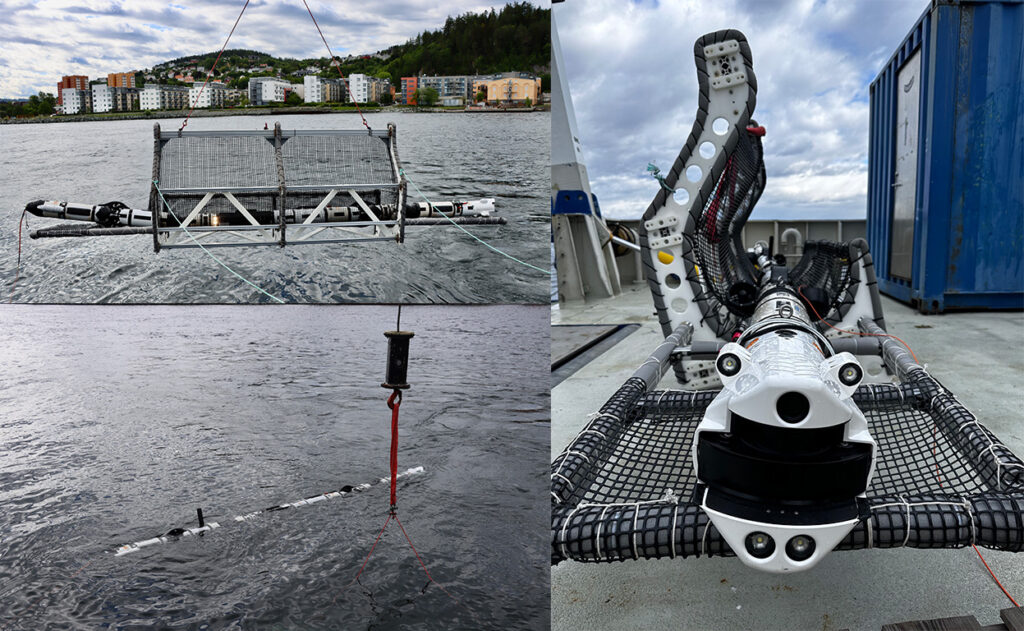
– Den skal fungere som et flygende tredje øye. Det kan være til stor hjelp når man skal gjøre operasjoner under vann. Det fører til mer effektiv inspeksjons- og intervensjonskapasitet, forteller Martin Ludvigsen, professor på Institutt for marin teknikk.
Han er ombord Gunnerus med fire stipendiater og en post doc. De er marin-kybernetikere ved Institutt for marin teknikk (IMT) eller Institutt for teknisk kybernetikk (ITK). Driverne bak prosjektet er ham selv sammen med Kristin Y. Pettersen, professor ved ITK, Asgeir J. Sørensen, professor ved IMT og Kjetil Skaugset, professor 2 IMT.
For å kunne gjøre testene og operasjonene er mannskapet ombord og feltingeniører ved NTNUs AUR-Lab (Applied Underwater Robotics Laboratory) helt avgjørende.
– Målet med å ha en hjelperobot som et tredje øye er å unngå at Eelume setter seg fast eller kommer borti noe, forteller Ludvigsen.
Nytt navigasjonssystem

Den andre delen av dagen er viet en større undervannsrobot ved navn Minerva.
Navigasjonssystemet på Minerva er laget av post doc Erlend Basso, og er en forbedring av standardoppsettet man får fra leverandøren. Navigasjon, posisjon, hastighet og orientering (kompass, rull, stamp, heading) er koblet sammen i en estimator.
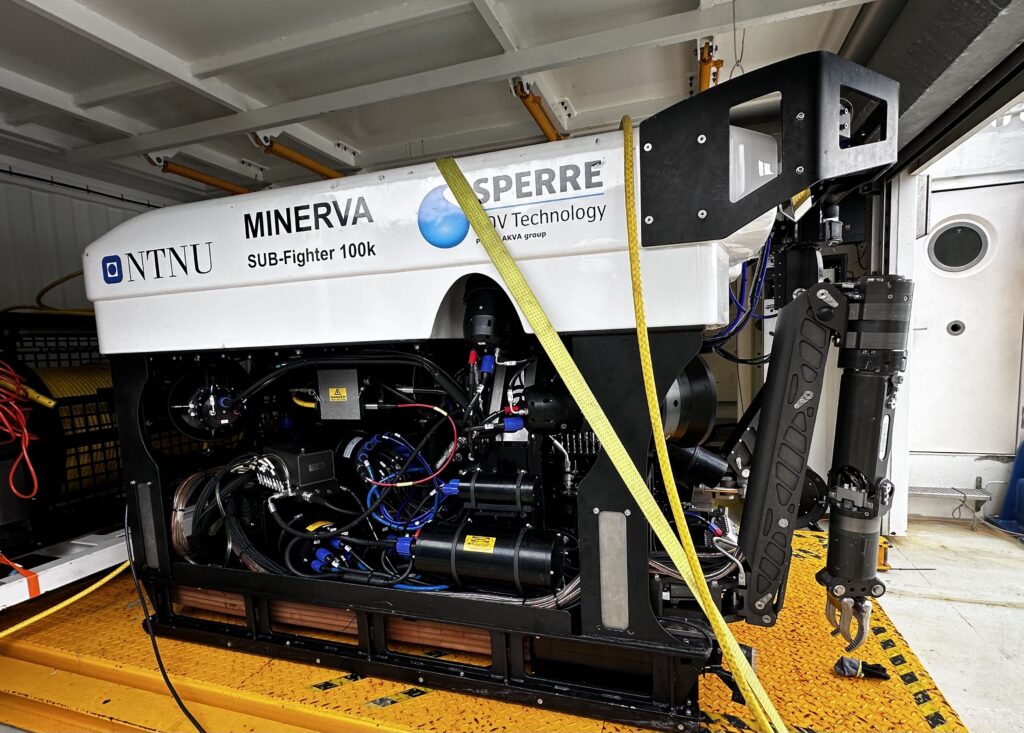
– Både BlueROV og Minerva bruker dette navigasjonssystemet, forteller Basso.
Stipendiat Ambjørn Waldum og Erlend Basso har i tillegg laget et kontrollsystem og en navigasjons-estimator som gjør at robotene kan stå stille under vann eller bevege seg mer nøyaktig, såkalt «station keeping».
– Det handler om å få robotene til å vite hvor de er, å få dem til å gå dit du vil de skal gå og forstå verden rundt seg, det vi kaller situasjonsforståelse. Vi bygger softwareinfrastruktur i laben, komponent på komponent for å få til et autonomt system, sier Ludvigsen.

Ambjørn Waldum ved IMT og Pushyami Kavetis, fra North Eastern University i Bostons samarbeider tett om å lage et system som lager 3D-modeller i sanntid ved hjelp av et flerkamerasystem og navigasjonssystemet som allerede er inne i Minerva.
– Det kan brukes til autonom navigasjon og autonom intervensjon – om man skal skru en ventil eller ta en prøve fra havbunnen, så er dette nyttig, forteller Ambjørn Waldum.
Hva kan det brukes til?

Undervannsroboter kan brukes til mye forskjellig. De kan støtte marinbiologer i undersøkelsen av livet under vann og hvordan det står til under havoverflaten i en tid med store klimaendringer.
– Det kan gjøres uten den samme risikoen som dykkere har og med mulighet til å bevege seg over større avstander, sier Ludvigsen.
Undervannsroboter brukes også til å kartlegge spor av mennesker under vann, som her utenfor Ila, eller i Mjøsa hvor det ligger masse ammunisjon og bomber dumpet fra Raufoss våpenfabrikk.
– I «Mission Mjøsa» har NTNU og Forsvaret kartlagt Norges største innsjø ved hjelp av undervannsroboter og funnet både det som kan være skip fra middelalderen og at det er langt mer avfall fra våpenfabrikken enn man har trodd, sier Asgeir J. Sørensen, leder for Vista CAROS og professor i marin kybernetikk.
Les om Oppdrag Mjøsa her: Det er først nå det virkelig begynner
Robotene kan også brukes til inspeksjon av undervannsinstallasjoner – som gassrør, fiberkabler, forankring av havvind langt nedi dypet eller i havbruk.
Ulike forskningsprosjekter finansiert fra ulike kilder gjør at man kan gjøre denne forskningen. I dag er det prosjektet Vista CAROS finansiert av Det Norske Vitenskaps-Akademi som er ute på sjøen.
Vista CAROS er et mini NTNU AMOS – et senter for autonom robotikk og operasjoner under vann.
Forskningen her handler om å få store og små undervannsroboter til å samarbeide ute på oppdrag, å utvikle dem til å bli så selvstendige at de kan dokke og lades under vann, samtidig som de sender informasjon opp til overflaten.
Forskningen kan brukes både til industrielle formål og havforskning.